股權投資 村集體經濟組織投資方式多元化的新探索

隨著鄉村振興戰略的深入推進,村集體經濟組織在股權投資及新興產業領域的投資方式日益多元化。這一趨勢不僅為農村經濟注入了新活力,也為集體資產的保值增值開辟了新路徑。
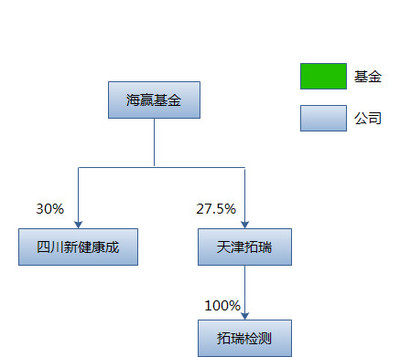
股權投資作為一種新型投資模式,正逐漸被村集體經濟組織采納。通過參股初創企業、高新技術公司或地方特色產業項目,村集體能夠以股東身份分享企業成長紅利。例如,某沿海村莊集體資金入股本地海洋生物科技企業,三年內獲得超過200%的回報;西部某村集體投資新能源項目,既帶動了就業,又實現了資產增值。
在投資領域方面,村集體開始涉足智能制造、現代農業、文化旅游等新興產業。這些領域與農村資源稟賦高度契合,既能發揮本土優勢,又能對接外部資本和市場。某中部省份的村集體聯合成立產業投資基金,專門投向數字農業和智慧物流項目,有效盤活了閑置集體資產。
這種投資方式的轉變背后,是管理理念的更新和風險控制機制的完善。許多地區建立了專業投資團隊,引入第三方評估機構,設立風險準備金,確保投資決策科學規范。地方政府也出臺配套政策,為村集體參與股權投資提供制度保障。
值得注意的是,村集體經濟組織在拓展投資渠道時,仍需堅持穩健原則。應建立適合農村特點的投資評價體系,優先選擇與本地產業關聯度高、帶動能力強的項目,避免盲目跟風。通過“試水-總結-推廣”的漸進模式,讓股權投資真正成為壯大集體經濟的有效工具。
隨著農村金融環境的改善和人才隊伍的壯大,村集體經濟組織的投資方式將更加多元和專業。股權投資與傳統資產經營相結合,有望構建起更加可持續的農村集體經濟發展新模式,為鄉村振興提供堅實的經濟基礎。
如若轉載,請注明出處:http://www.szgc91.cn/product/30.html
更新時間:2026-06-15 10:05:43